首页
关于我们
公司介绍
技术能力
发展历程
产品中心
仿生黏附垫/壁虎贴
仿生摩擦垫
PSC物理吸盘
APR版
应用领域
晶圆传输搬运
APR版/配向膜的生产
CG盖板/面板镀膜
湿态防滑/擦窗机器
真空贴合
仿壁虎随手贴
新闻中心
技术创新
前沿创新
知识产权
联系我们
中文
中文
EN
搜索
首页
- 应用领域
应用领域
晶圆传输搬运
APR版/配向膜的生产
CG盖板/面板镀膜
湿态防滑/擦窗机器
真空贴合
仿壁虎随手贴
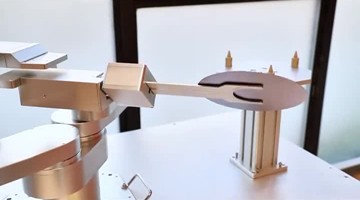
范德华力黏附式Fork
中高真空、常温/高温环境下固定或搬运晶圆的仿生增摩垫,提供较高的切向摩擦力和法向黏附力,提升晶圆搬运的速度、效率和稳定性,解决一类半导体领域高摩擦高黏附的通用界面操控问题
真空贴合
针对大尺寸晶圆和玻璃基板ODF 真空贴合设备的核心器件,可以保证在高真空(<0.3pa)环境下玻璃基板的高精度(≤0.2μm)贴合
壁虎贴
用于产品的固定,板材的平整度矫正,为生活中物体的固定,提供便捷方法。方便物体随时移动固定位置。
擦窗机器人
大大提升擦窗爬壁机器人在含水表面摩擦力系数,有效提升机器在含水表面的黏附力和工作能力
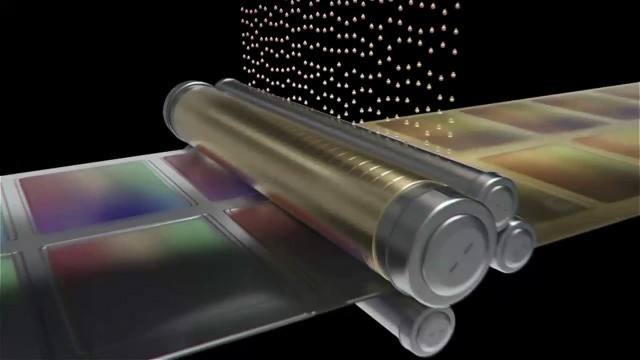
APR版应用于配向膜的生产
用于液晶面板的配向膜印刷的柔性印刷版
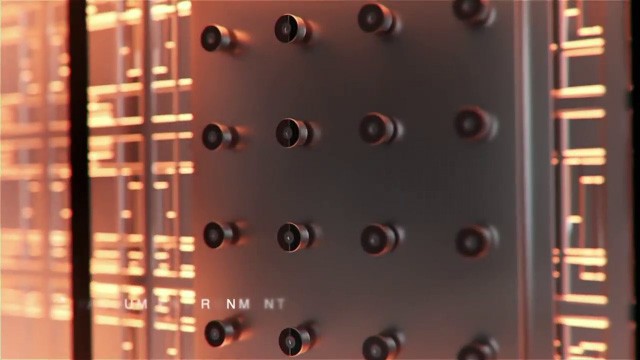
面板玻璃镀膜
产品用于泛半导体行业中高真空、高温等环境下光滑、易碎材料表面(玻璃、显示屏、晶圆等)的重复固定与搬运需求,解决机械夹持易划伤、化学胶易残胶、真空吸盘无法用等技术问题。基于范德华力黏附原理,成功研发了系列化的仿生黏附垫产品,表面微结构的仿生设计实现了界面裂纹扩展的抑制功能,增强了黏附的稳定性,同时为切向旋转、吹气等解片方式预置了接口。
晶圆搬运
中高真空、常温/高温环境下固定或搬运晶圆的仿生增摩垫,提供较高的切向摩擦力和极低的法向黏附力,提升晶圆搬运的速度、效率和稳定性,解决一类半导体领域高摩擦、低黏附的通用界面操控问题